How can I get personalized feedback on this assignment? In addition to the autograder feedback (available for free via Coursera platform), you can pay to have a teaching assistant read and provide personalized feedback on your submission at codePost.
What should I do if a point has the same x-coordinate as the point in a node when inserting / searching in a 2d-tree? Go the right subtree as specified.
Can I assume that all x- or y-coordinates of points inserted into
the KdTree will be between 0 and 1?
Yes. You may also assume that the insert(), contains(), and
nearest() methods in KdTree
are passed points with x- and y-coordinates between 0 and 1.
You may also assume that the range() method in KdTree is
passed a rectangle that lies in the unit box.
What should I do if a point is inserted twice in the data structure? The data structure represents a set of points, so you should keep only one copy.
Is a point on the boundary of a rectangle considered inside it? Do two rectangle intersect if they have just one point in common? Yes and yes, consistent with the implementation of RectHV.java.
What does the notation [0.5, 0.75] × [0.25, 0.375] mean when specifying a rectangle?
It is the Cartesian product
of the x-interval [0.5, 0.75] and the y-interval [0.25, 0.375]:
the rectangle that includes all points with both 0.5 ≤ x ≤ 0.75
and 0.25 ≤ y ≤ 0.375.
Note that the arguments to the RectHV
constructor are in the order xmin, ymin, xmax, and ymax
but the toString() method uses the Cartesian product notation.
How should I scale the coordinate system when drawing? Don't, please keep the default range of 0 to 1.
How should I set the size and color of the points and rectangles when drawing?
Use StdDraw.setPenColor(StdDraw.BLACK) and StdDraw.setPenRadius(0.01) before
before drawing the points;
use StdDraw.setPenColor(StdDraw.RED) or StdDraw.setPenColor(StdDraw.BLUE)
and StdDraw.setPenRadius() before drawing the splitting lines.
What should range() return if there are no points in the range?
It should return an Iterable<Point2D> object with zero points.
How much memory does a Point2D object use?
For simplicity, assume that each Point2D object uses 32 bytes—in reality,
it uses a bit more because of the Comparator instance variables.
How much memory does a RectHV object use?
You can look at the code and analyze it.
I run out of memory when running some of the large sample files. What should I do?
Be sure to ask Java for additional memory,
e.g., java -Xmx1600m RangeSearchVisualizer input1M.txt.
Testing.
A good way to test KdTree is to perform
the same sequence of operations on both the PointSET and
KdTree data types and identify any discrepancies.
The sample clients
RangeSearchVisualizer.java
and
NearestNeighborVisualizer.java
take this approach.
Sample input files. The zip file kdtree.zip contains many sample input files for testing.
circleN.txt contains n points on the circumference
of the circle centered on (0.5, 0.5) of radius 0.5.
draw() on the points in circle10.txt
should look like the following:
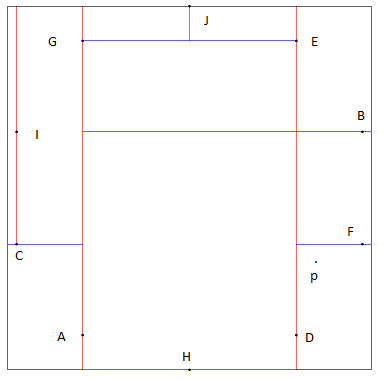
nearest() is called with p = (0.81, 0.30) the number of nodes visited in order
to find that F is nearest is 5.
private static class Node {
private Point2D p; // the point
private RectHV rect; // the axis-aligned rectangle corresponding to this node
private Node lb; // the left/bottom subtree
private Node rt; // the right/top subtree
}
Unlike the Node class for BST, this Node class is
static because it does not refer to a generic Key or Value type
that depends on the object associated with the outer class. This saves the
8-byte inner class object overhead. (Making the Node class static
in BST is also possible if you make the Node type itself
generic as well).
Also, since we don't need to implement
the rank and select operations, there is no need to store the subtree size.
isEmpty() and size(). These should be very easy. From there,
write a simplified version of insert() which does everything except set up the
RectHV for each node. Write the contains() method, and use this to test that
insert() was implemented properly. Note that insert() and contains()
are best implemented by using private helper methods analogous to those found on page 399
of the book or by looking at BST.java. We recommend using orientation as an
argument to these helper methods.
Now add the code to insert() which sets up the RectHV for each Node. Next,
write draw(), and use this to test these rectangles. Finish up KdTree with the
nearest and range methods. Finally, test your implementation using our interactive client
programs as well as any other tests you'd like to conduct.
RectHV in each 2d-tree node (though it
is probably wise in your first version).